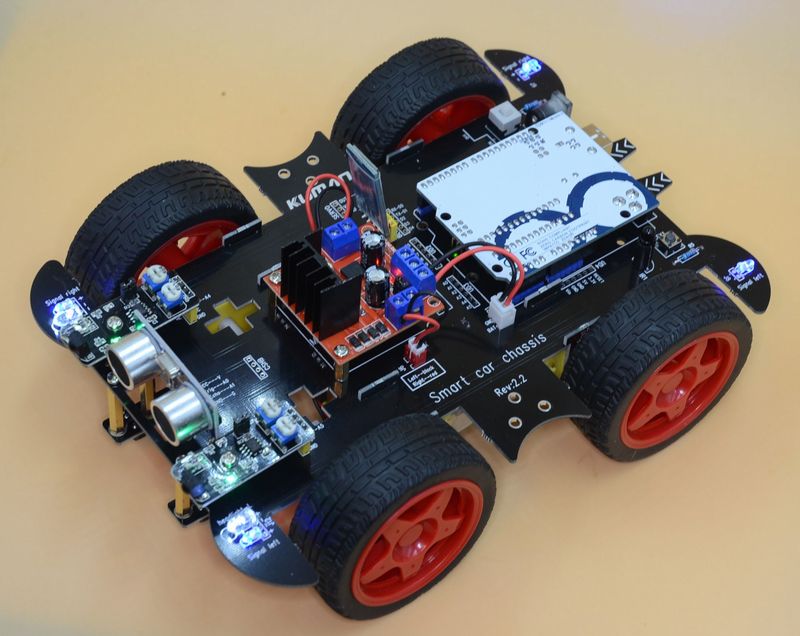
Kuman社のスマートロボットカーSM11(旧型)です。
Arduino UNO R3互換のボードを搭載していて、プリインストールされているプログラムで各種モードでで動かせますし、 Arduino IDEでプログラミングすることも出来ます。
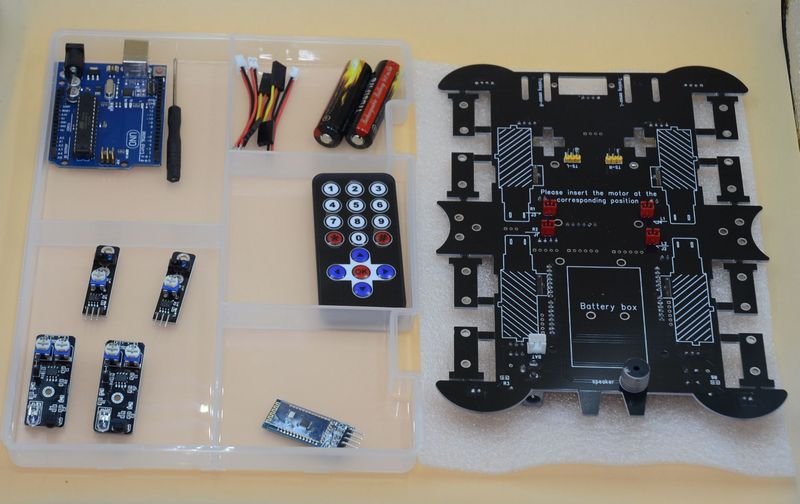
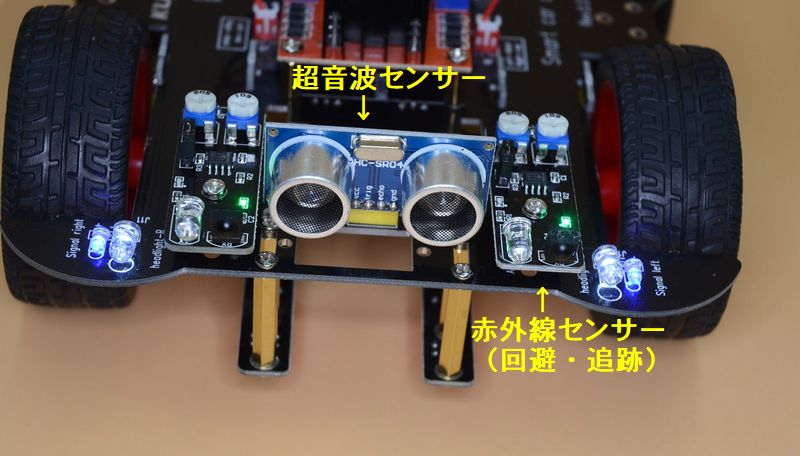
ケースの中にはArduino UNO R3ボード、超音波センサー、回避・追跡用の赤外線センサー、ライントレース用の赤外線センサー、Bluetoothモジュールなど入っています。

マニュアルは英文のみです。発売元のHPを調べると日本語マニュアルのPDFがありますが、同型番の首振り機能付きの新型のものです。ですが、そんなに複雑な組み立てではないので、英文マニュアルとYouTubeの動画を見ながらで1時間ほどで出来ます。(動画のURLはamazonの販売ページで分かります。)
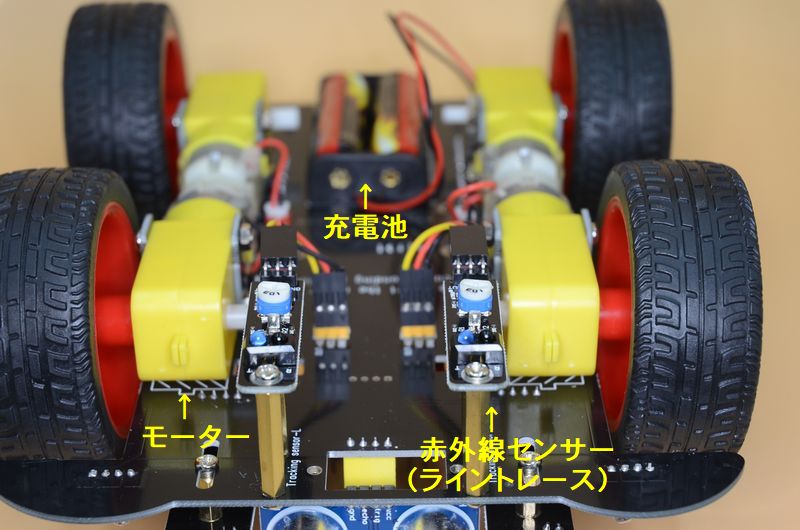
実は、こうしたロボットカーを組み立てるときに一番イラッとくるのは、モーターのネジ止めだったりします。このSM11の場合も、部品のハンダ付けの盛り上がりでナットがはめにくかったり接触してショートの危険もあるので注意が必要です。
完成してスイッチを入れるとデフォルトで赤外線リモコンモードになっています。
リモコンの2ボタンで回避モード、3ボタンでライントレースモード、4ボタンで追尾モードに切り替えて9ボタンでスタートします。停止は7ボタンです。
Bluetoothモードに切り替えるとスマートフォンなどでリモコン操作できるようになりますが、CD-ROMに入っている.apkファイルをスマートフォンやタブレットに書き込んでインストールの制限を外して・・・となると慣れていない人には敷居が高いかも知れませんね。