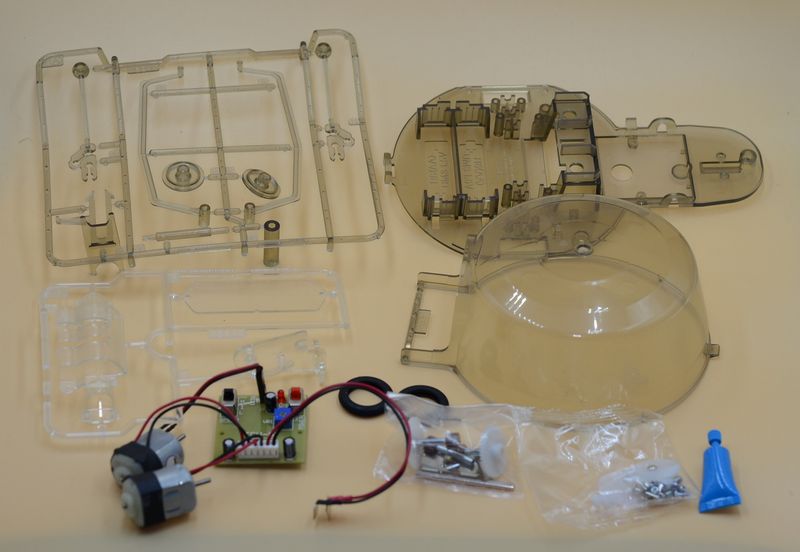
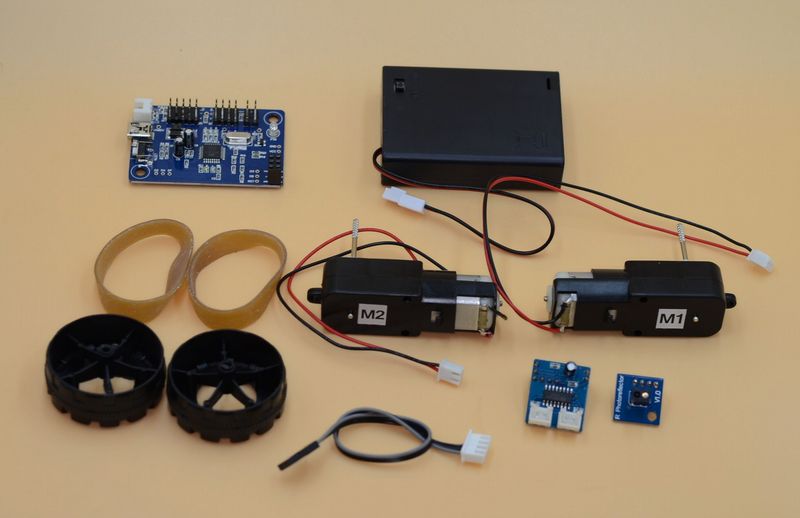
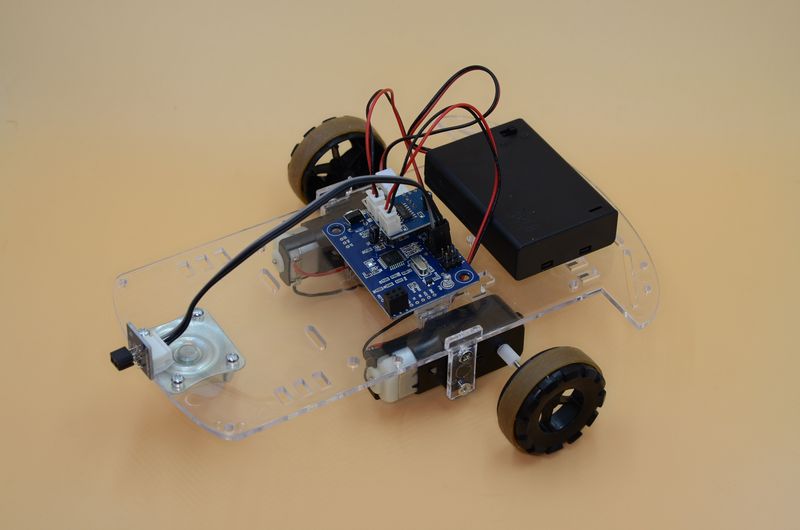
アーテックのプログラムロボットカーのセットを試してみました。スタディーノミニとDCモーターがセットになった一番基本のやつです。
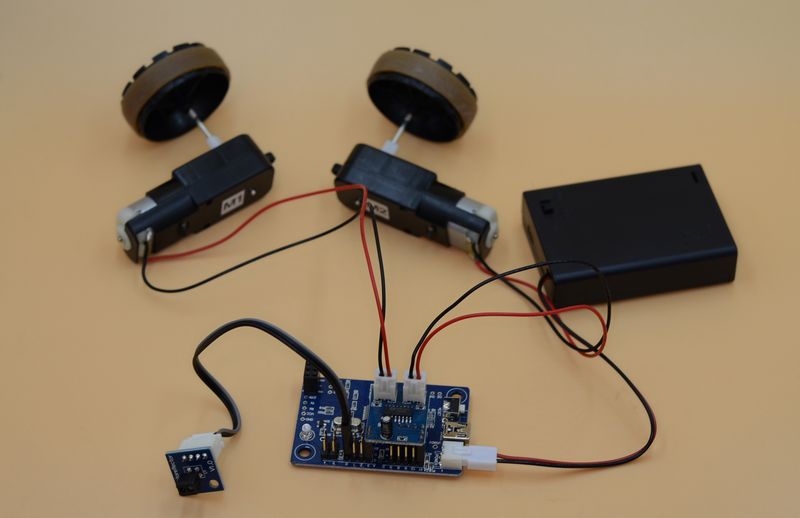
説明書通り組み立てて見ましたが、ここまでです。この後「身近にある材料を使って」ロボットカーを製作しましょうと言われても支持金具とかL字アングルとかはなかったので、ロボットカーのシャーシキットに取り付けてみました。
次はプログラミングです。 https://www.artec-kk.co.jp/studuino/ja/ からソフトウェアをダウンロード。解凍します。プログラミング環境はScratchを元にしたビジュアルプログラミングです。

初期設定ではDCモーター、赤外線フォトリフレクターが使えるようになっていないので、「編集」から「入出力設定」を選んでサーボモーター、LEDのチェックを外して、DCモーター、赤外線フォトリフレクターをチェックします。DCモーターとLEDは同時に使用できない使用です。この設定は起動するたびに必要です。
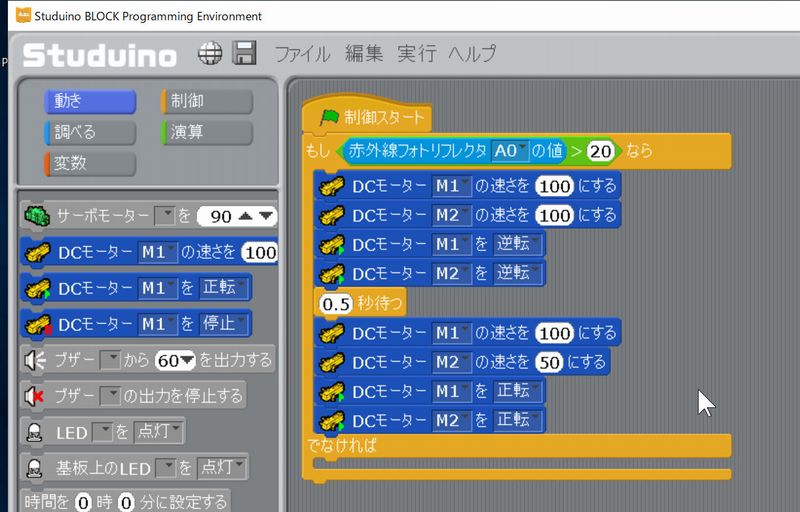
赤外線フォトリフレクターを使って衝突を回避するプログラムを組んでみましょう。
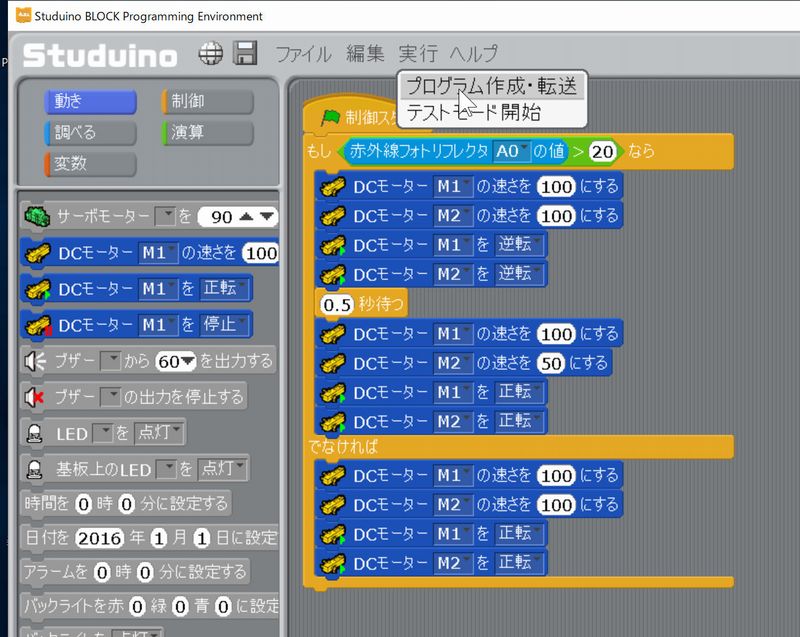
赤外線フォトリフレクターの値が大きいほど距離が近いことになるので、ある値を越えたらいったんバックして右に曲がるようにしてみます。そうでなければ直進です。
プログラムが組めたらスタディーノミニに転送します。PCとの接続はUSBですが、スタディーノミニ側のコネクターがUSB mini Bなので付属のUSBケーブルを使います。
で、走らせてみましたが、うまく反応しません。テストモードで確かめると赤外線フォトリフレクターはちゃんと作動しているようですが・・・原因は調査中です・・・